مبانی هوش مصنوعی - عوامل و محیطها
یک سیستم هوش مصنوعی از یک عامل و محیط آن تشکیل شده است. عوامل در محیط خود عمل می کنند. محیط ممکن است حاوی عوامل دیگر نیز باشد.
عامل و محیط چیست؟
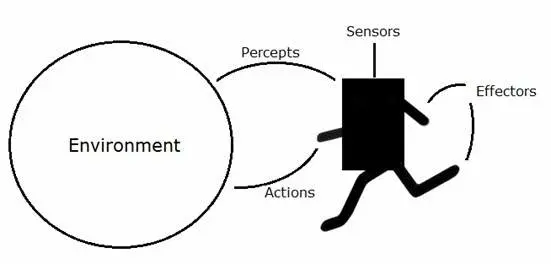
یک عامل هر چیزی است که می تواند محیط خود را از طریق سنسورها درک کند و بر آن محیط از طریق اثرگذارها عمل کند.
-
یک عامل انسانی دارای اندام های حسی مانند چشم ها، گوش ها، بینی، زبان و پوست موازی با سنسورها و سایر اندام ها مانند دست ها، پاها، دهان، برای اثرگذارها است.
-
یک عامل رباتیک دوربین ها و ردیاب های مادون قرمز را برای سنسورها و موتورهای مختلف و عملگرها برای اثرگذارها جایگزین می کند.
-
یک عامل نرم افزاری رشته های بیت کدگذاری شده را به عنوان برنامه ها و اقدامات خود دارد.
اصطلاحات عامل
-
معیار عملکرد عامل − این معیار است که تعیین می کند یک عامل چقدر موفق است.
-
رفتار عامل − این عمل است که عامل پس از هر توالی ادراک داده شده انجام می دهد.
-
ادراک − این ورودی های حسی عامل در یک زمان معین است.
-
توالی ادراک − این تاریخچه همه چیزهایی است که یک عامل تا به امروز درک کرده است.
-
تابع عامل − این یک نقشه از توالی ادراک به یک عمل است.
عقلانیت
عقلانیت چیزی جز وضعیت معقول بودن، منطقی بودن و داشتن حس قضاوت خوب نیست.
عقلانیت با انتظارات عمل و نتایج بسته به آنچه عامل درک کرده است، مرتبط است. انجام اقدامات با هدف به دست آوردن اطلاعات مفید، بخشی مهم از عقلانیت است.
عامل ایده آل عقلانی چیست؟
یک عامل ایده آل عقلانی یکی است که قادر است اقدامات مورد انتظار را برای به حداکثر رساندن معیار عملکرد خود، بر اساس −
- توالی ادراک خود
- پایگاه دانش داخلی خود
عقلانیت یک عامل به موارد زیر بستگی دارد −
-
معیارهای عملکرد
-
توالی ادراک عامل تا کنون
-
دانش قبلی عامل در مورد محیط
-
اقداماتی که عامل می تواند انجام دهد
یک عامل عقلانی همیشه عمل درست را انجام می دهد، که به این معنی است که عمل باعث می شود عامل در توالی ادراک داده شده بیشترین موفقیت را داشته باشد. مشکلی که عامل حل می کند با Performance Measure، Environment، Actuators و Sensors (PEAS) مشخص می شود.
ساختار عوامل هوشمند
ساختار عامل را می توان به عنوان −
- عامل = معماری + برنامه عامل
- معماری = ماشینی که عامل روی آن اجرا می شود.
- برنامه عامل = پیاده سازی یک تابع عامل.
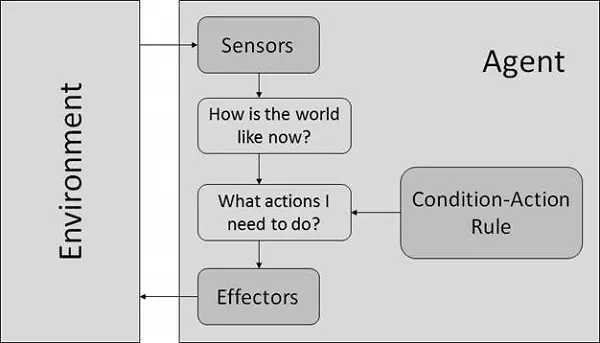
عوامل رفلکس ساده
- آنها فقط بر اساس ادراک فعلی عمل می کنند.
- آنها فقط عقلانی هستند اگر تصمیم درست فقط بر اساس فعل حال گرفته شود.
- محیط آنها کاملاً قابل مشاهده است.
قاعده شرط-عمل - این یک قاعده است که یک حالت (شرایط) را به یک عمل مرتبط می کند.
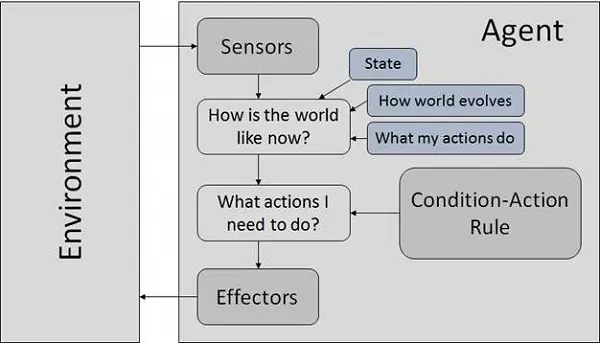
عوامل بازتاب مدل
آنها از یک مدل جهان برای انتخاب عمل خود استفاده می کنند. آنها یک حالت داخلی را حفظ می کنند.
مدل - دانش در مورد “نحوه اتفاق افتادن چیزها در جهان”.
وضعیت داخلی - این یک representation of unobserved aspects of current state است که به سابقه ادراک بستگی دارد.
به روزرسانی وضعیت به اطلاعات زیر نیاز دارد
- نحوه تکامل جهان.
- نحوه تأثیر اقدامات عامل بر جهان.
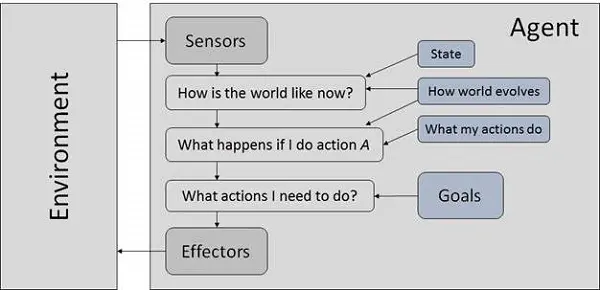
عوامل مبتنی بر هدف
آنها عمل خود را برای رسیدن به اهداف انتخاب می کنند. رویکرد مبتنی بر هدف انعطاف پذیرتر از عامل رفلکس است زیرا دانشی که از تصمیم پشتیبانی می کند به صورت صریح مدل سازی می شود ، که امکان تغییر آن را فراهم می کند.
هدف - این توصیف موقعیت های مطلوب است.
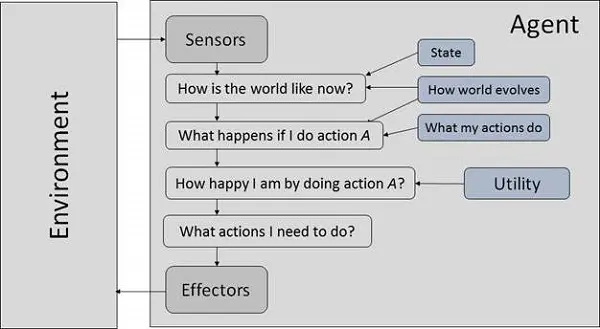
عوامل مبتنی بر سود
آنها بر اساس ترجیح (سود) برای هر حالت عمل می کنند.
اهداف ناکافی هستند زمانی که
- چند هدف متعارض وجود دارد که فقط می توان چند مورد از آنها را محقق کرد.
- اهداف دارای برخی عدم قطعیت در تحقق هستند و شما باید احتمال موفقیت را در برابر اهمیت هدف بسنجید.
طبیعت محیط ها
برخی برنامه ها در محیط کاملاً مصنوعی محدود به ورودی صفحه کلید ، پایگاه داده ، سیستم های فایل رایانه و خروجی کاراکتر روی صفحه نمایش عمل می کنند.
در مقابل ، برخی از نرم افزارهای عامل (روبات های نرم افزاری) در قلمروهای نرم افزاری غنی و نامحدود وجود دارند. شبیه ساز دارای یک محیط بسیار دقیق و پیچیده است. نرم افزار عامل باید از طیف گسترده ای از اقدامات در زمان واقعی انتخاب کند. یک نرم افزار نرم طراحی شده برای اسکن ترجیحات آنلاین مشتری و نشان دادن اقلام جالب به مشتری در محیط واقعی و همچنین مصنوعی کار می کند.
مشهورترین محیط مصنوعی محیط آزمون تورینگ است ، در آن یک عامل واقعی و سایر عوامل مصنوعی در یک سطح مساوی آزمایش می شوند. این یک محیط بسیار چالش برانگیز است زیرا برای یک نرم افزار عامل بسیار دشوار است که به خوبی یک انسان عمل کند.
آزمون تورینگ
موفقیت رفتار هوشمندانه یک سیستم را می توان با آزمون تورینگ اندازه گیری کرد.
دو نفر و یک ماشین برای ارزیابی در آزمون شرکت می کنند. یکی از دو نفر نقش آزمایشگر را بازی می کند. هر یک از آنها در اتاق های مختلف نشسته اند. آزمایشگر نمی داند که چه کسی ماشین و چه کسی انسان است. او سوالات را تایپ می کند و آنها را به هر دو هوش می فرستد ، که به او پاسخ های تایپ شده می دهد.
این آزمایش به هدف فریب دادن آزمایشگر است. اگر آزمایشگر نتواند پاسخ ماشین را از پاسخ انسان تشخیص دهد ، آنگاه گفته می شود که ماشین هوشمند است.
ویژگی های محیط
محیط دارای چند ویژگی است -
-
متناوب / پیوسته - اگر تعداد محدودی از حالات محیط به وضوح تعریف شده وجود داشته باشد ، محیط گسسته است (به عنوان مثال شطرنج) ؛ در غیر این صورت پیوسته است (به عنوان مثال رانندگی).
-
قابل مشاهده / partially observable - اگر امکان تعیین وضعیت کامل محیط در هر نقطه زمانی از ادراکات آن وجود داشته باشد ، قابل مشاهده است ؛ در غیر این صورت فقط partially observable است.
-
static / dynamic - اگر محیط در حالی که یک عامل عمل می کند تغییر نکند ، static است ؛ در غیر این صورت dynamic است.
-
عامل واحد / عوامل چندگانه - محیط ممکن است حاوی عوامل دیگری باشد که ممکن است از نوع مشابه یا متفاوتی از عامل باشد.
-
قابل دسترسی / غیرقابل دسترسی - اگر دستگاه حسی عامل می تواند به وضعیت کامل محیط دسترسی داشته باشد ، آنگاه محیط برای آن عامل قابل دسترسی است.
-
deterministic / non-deterministic - اگر حالت بعدی محیط به طور کامل توسط وضعیت فعلی و اعمال عامل تعیین شود ، محیط deterministic است ؛ در غیر این صورت non-deterministic است.
-
episodic / non-episodic - در یک محیط episodic ، هر قسمت شامل ادراک و سپس عمل عامل است. کیفیت عمل آن فقط به خود قسمت بستگی دارد. قسمت های بعدی به اقدامات قسمت های قبلی بستگی ندارند. محیط های episodic بسیار ساده تر هستند زیرا عامل نیازی به فکر کردن به جلو ندارد.